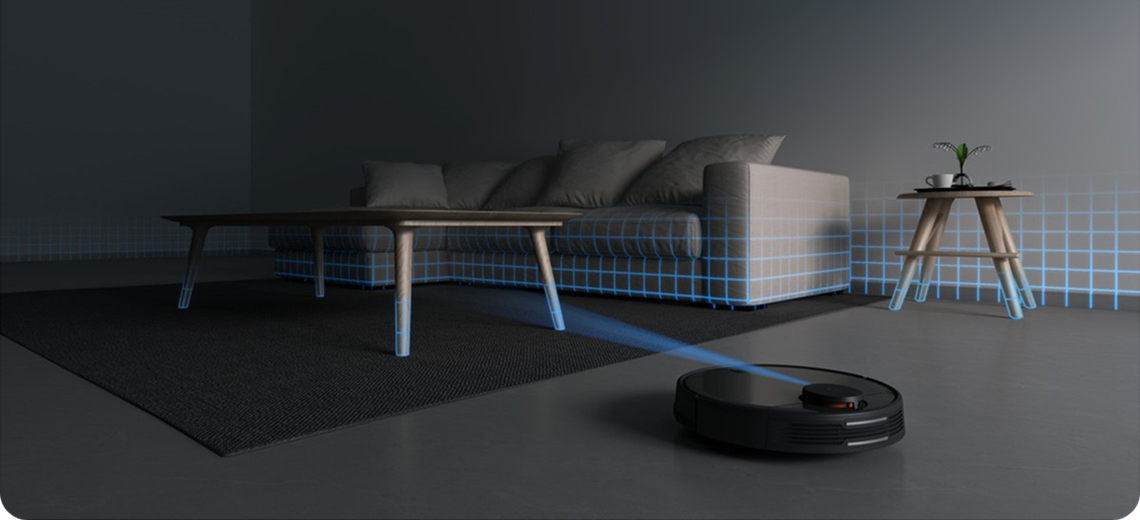
بعد أن يقوم الروبوت الكاسح الذكي ببناء خريطة للمنزل من خلال خوارزمية SLAM استنادًا إلى أجهزة الاستشعار مثل مستشعرات المدى بالليزر ووحدات القياس بالقصور الذاتي ، فإنه يحدد موقعه وفقًا لمنطقة المنزل ، وفي نفس الوقت يخطط لمسار تنظيف ذكي وفعال من خلال AI الخوارزمية ، والتي يمكن أن تتجنب بشكل فعال المسح الضائع. إعادة الفحص ، ويقوم جانب الخادم باستمرار بترقية خوارزمية الروبوت بشكل تكراري من خلال التعلم العميق وتحسين الخوارزمية لبيانات المنتج المتصلة بالشبكة.
هذا يعني أيضًا أن الروبوت الكاسح يدمج أجهزة استشعار متعددة مثل lidar و 3D tof والكاميرات ثنائية العين بالإضافة إلى خوارزميات الذكاء الاصطناعي والتعرف على الصوت وما إلى ذلك. من منظور البصريات ، تحتاج الروبوتات الكاسحة أيضًا إلى تعاون مصنعي الكاميرات ، بما في ذلك الرقائق والوحدات والخوارزميات.
ربط وحدات الكاميرا